SLAM: Grid Map 模型和工程实现
概述
Grid map是SLAM中地图表示的一种常用方式。我们大概都知道这种表示方式就是把地图的 一个点用一个概率值[0,1]来表示这个点被障碍物占据的概率。但是具体研究和使用的时 候有发现对它的理解似乎有点偏差。这里对Grid map进行一个总结,希望看完能理解其原 理和使用方法。
Grid 是怎么表示地图的?
测距传感器(scan)得到的是一个射线的点,点是射线打到障碍物上返回的地方,这个地方 最有可能是有障碍物的地方,之所以说可能是因为测量会有误差,所以总是不能完全确定 有障碍物的就是返回的那个点,加上传感器本身就有误差,所以一定存在不确定行。因此, 对一个点的状态就有概率来表示吧。
一个问题是如何表示一个点呢?scan得到的是一个点,地图上显然不能精确的表示这个点, 只能采用离散的方式,将一个空间划分成固定边长(分辨率)一个一个的格子,叫做像素。 这个像素包含了scan点附近一定范围的很多点。具体就是如果scan的点在这个格子里面, 就认为这个格子(cell)是被障碍物占据了,而从scan原点到scan点之间线段经过的cell则 认为是空白的(free)。
概率表示
我们用 \(p(x=1)\) 和 \(p(x=0)\) 分别表示一个cell是障碍物(occupied)或者空白(free)的 概率。当引入一个新的scan之后,由于存在上述的不确定性,我们不会就这样就断定相关 点概率为1或者0。通常是根据传感器的特性会给出一个值表示occupied( \(p(hit)\) ),另 一个值表示free(\(p(miss)\))。当又有scan经过这些点之后这样我们要对相关的cell进行 更新。而原则就是如果一 个cell 多次确定 是occupied或者free,那么他们的概率就 会越接近1或者0。
默认情况下,一个cell是occupied和free概率相同,也就是 \(p(x=1)=p(x=0)=0.5\) ,新的 scan观测信息 \(z\) 经过这些点之后就会更新,这时候相当于是计算 \(p(x|z)\) :
\begin{equation} p(x|z)=\frac{p(x)p(z|x)}{p(z)} \end{equation}概率比表示
如果每个点都要进行这些乘除运算会比较浪费资源,那么我们用另一种更方便的表示方法 来处理,引入概率比\(odd(x)\) :
\begin{equation} odd(x)=\frac{p(x=1)}{p(x=0)} \end{equation}我们会设置一个概率的最大最小值,防止分母出现0的情况,比如[0.1,0.9]。
- 初始情况下: 一个cell的状态没有任何信息,occupied和free的概率都是0.5,那 \(odd(x)=0.5/0.5=1\) 。当一个cell是障碍物可能性更大的时候,分子大于分母, \(odd(x)>1\) ,反之 \(0 < odd(x) < 1\)
当一个cell第一次被scan更新:
\begin{cases}odd(x)=\frac{p(hit)}{1-p(hit)} & x \ is \ occupied\\odd(x)=\frac{p(miss)}{1-p(miss)} & x \ is\ free \end{cases}当一个cell再次被更新时:
\begin{equation} odd_{new}(x) = odd(x|z) = \frac{p(x=1|z)}{p(x=0|z)}=\frac{\frac{p(z|x=1)p(x=1)}{p(z)}}{\frac{p(z|x=1)p(x=1)}{p(z)}}=\frac{p(z|x=1)p(x=1)}{p(z|x=0)p(x=0)}=odd_{old}(x)\frac{p(z|x=1)}{p(z|x=0)} \end{equation}其中 \(odd_{new}(x)\) 表示更新后的状态, \(odd_{old}(x)\) 表示上次更新的状态。 \(\frac{p(z|x=1)}{p(z|x=0)}\) 是传感器的观测模型,由传感器自身决定,是一个常数。 结果为:
\begin{equation} \frac{p(z|x=1)}{p(z|x=1)} = \begin{cases}\frac{p(z=1|x=1)}{p(z=1|x=0)} & p(hit)\\\frac{p(z=0|x=1)}{p(z=0|x=0)} & p(miss)\end{cases} \end{equation}
概率比的对数表示
上面的计算依然是有几个乘除运算,更了更加简单,我们可以使用对数,将其转化为加 减运算。对上式两边取对数:
\begin{equation} \lg{odd_{new}(x)} = \lg{odd_{old}(x)} + \lg{\frac{p(z|x=1)}{p(z|x=0)}} \end{equation}当一个cell倾向于是occupied的时候,对数>0,反之则<0。
其中加号左侧是上一次更新的结果,后边依然是随传感器本身确定的常数,相应的这个 cell被确定为occupied或者free对应两个常数,我们分别定义为 \(looccu\) 和 \(lofree\) 。 这样更新结果就简单了。
加入 \(looccu=0.9\) ,\(lofree=-0.7\) ,看看下面的更新结果。
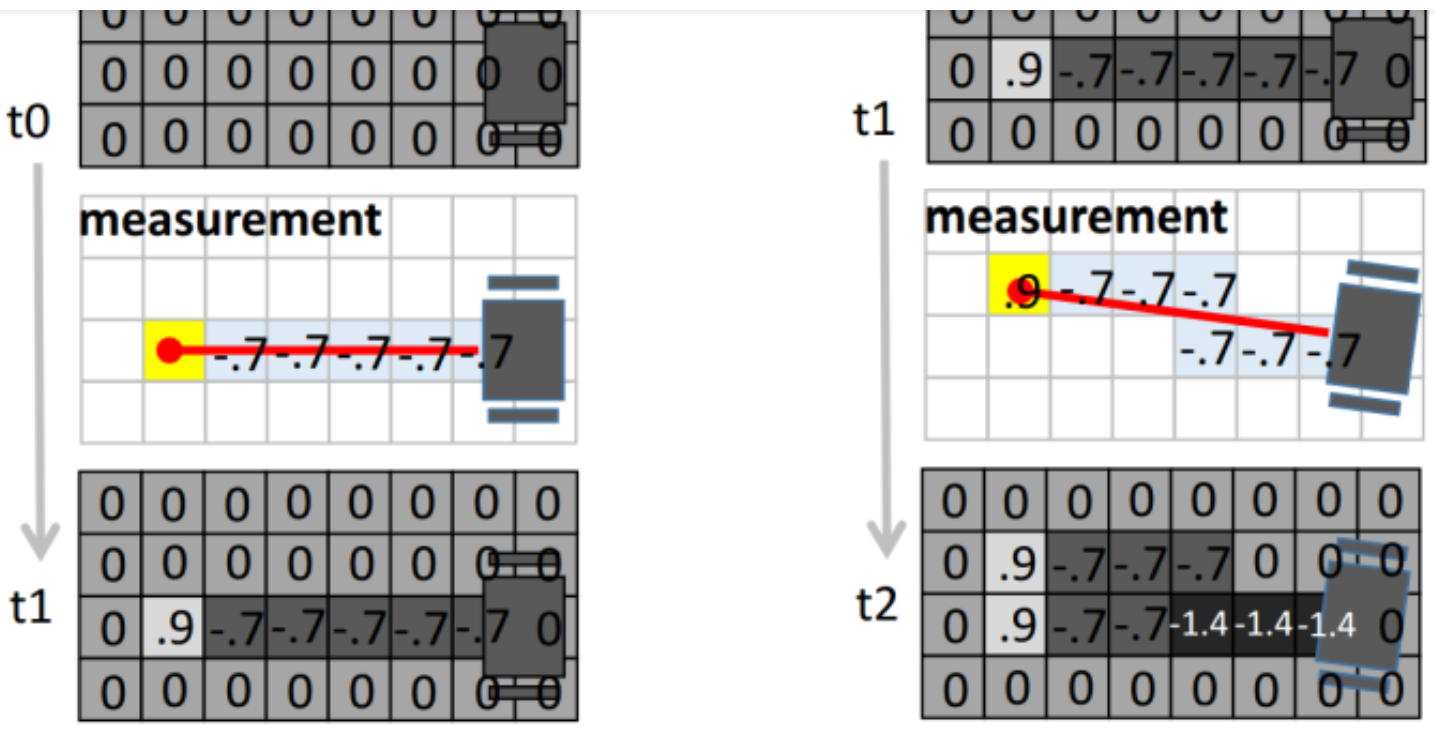
Figure 1: 更新例子
工程中直接查表不计算就更新结果
在看cartographer的代码的时候,发现它预先保存了两个表,将概率区间 [pmin, pmax] 直接通过查表就可以更新结果。
因为前面说了更新的实质就是这个cell状态被确定的次数越多,状态确定性越大。上式 中加号右边是两种值,那么就可以创建两个表 hit_tables 和 miss_table,加号坐标的 值范围也是确定的,那么我们就将这个范围按照足够小的步长分别计算出结果存在两个 表中。这样每一个 \(\lg{odd_{old}(x)}\) 在两个表中分别对应一个结果。根据上次更新 的结果直接在两个表中查询就得到了更新的结果了。一次计算都不用。
cartographer中为了效率更高,将[pmin,pmax]的浮点数全部映射到uint16的整数区间, 两个表都是一个数组,index就代表概率的大小,其实更加简单了。
参考
[1] zhihu: 占据栅格地图