Costmap: inflation 层
概述
膨胀层cost的计算是根据cell距离障碍物的距离计算,总的原则就是 距离障碍物越近,cost就越大 ,而 远近的界限主要是两个,一个是机器人的内切半径范围,另一个是膨胀半径范围,表示如下图:
值得注意的是,我们使用半径是已经经过膨胀之后的半径。使用参数footprint_padding 参数膨胀的。
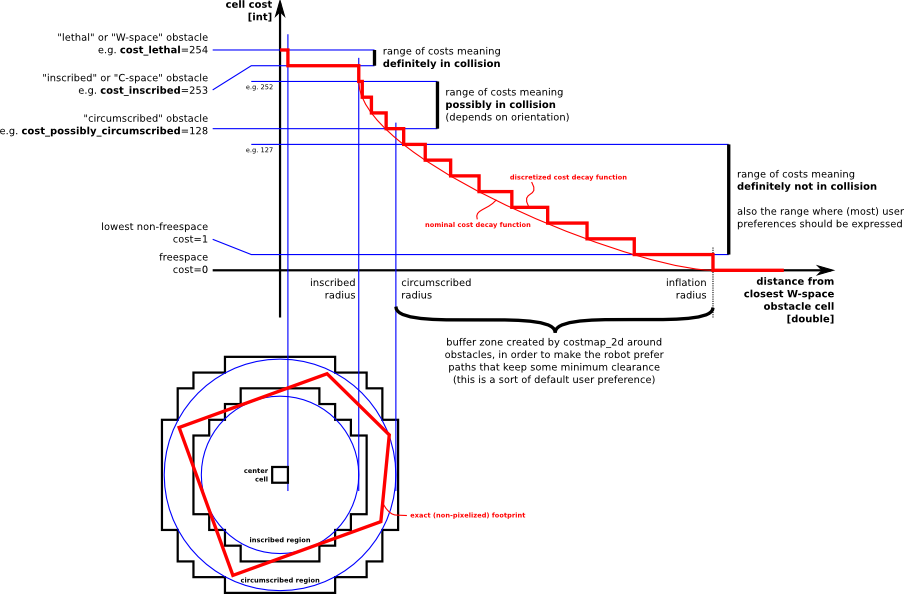
Figure 1: inflation layer cost computation
即:
- Lethal: 这些方格里面是实实在在的障碍物;
- Inscribed: 这些方格距离障碍物的距离小于机器人的内切半径,机器人中心落在这些方格里面当然会和一些障碍物发生碰撞;
- Possibly circumscribed: 这些方格距离障碍物距离大于内切半径,机器人中心落在这些方格里面时,在某些朝向上可能会和障碍物发生碰撞,所以(但是在膨胀半径内)通过指数分布来确定cost即可;
- Freespace: 超过膨胀半径的认为是空的区域;
- Unknown: 其他区域作为位置区域,我们在初始化的时候,如果设置了track_unknown_space,则将其设置为255了,否则设置为0。
代码实现
move_base中,全局规划的时候如果使用了inflation layer,会根据膨胀半径和机器人内切半径(由足迹确定),计算出两个大小相同的矩阵,作为kernel,来计算cost值。
参数和变量
参数
| 参数 | 默认 | 说明 |
|---|---|---|
| INFLATION_PADDING | 0.1(m) | |
| COST_SCALING_FACTOR | 0 | |
| INFLATE_UNKNOWN | 1 |
static const unsigned char NO_INFORMATION = 255; static const unsigned char LETHAL_OBSTACLE = 254; static const unsigned char INSCRIBED_INFLATED_OBSTACLE = 253; static const unsigned char FREE_SPACE = 0;
重要变量
| 变量 | 默认 | 说明 |
|---|---|---|
| inflate_unknown_ | INFLATE_UNKNOWN | |
| need_reinflation_ | false | 当cost_scaling_factor,inflation_radius,footprint变化的时候,需要重新计算kernel,重新计算边界。 |
| seen_[size_x * size_y] | new bool[size_x * size_y] | 用来标记这个index对应的方格是否已经被计算过。 |
| height_ | COST_SCALING_FACTOR | 计算cost时用到的一个系数。 |
| inflation_radius_ | INFLATION_PADDING | 膨胀半径. |
| cell_inflation_radius | inflation_radius_(m)转化为cells个数(基于resolution). | |
| cached_cell_inflation_radius_ | cell_inflation_radius的缓存,出现变化,二者不同的时候,要重新计算kernel和costs。 | |
| inscribed_radius_ | 内切圆半径 | |
| inflation_cells_ | ||
| cached_distances_ | size为cell_inflation_radius_+2的double指针数组。 | |
| cached_costs_ | size为cell_inflation_radius_+2的uchar指针数组。 |
计算cost值
计算kernel值
如果 cell_inflation_radius_ == 0, 则不用进行膨胀。
cached_costs_ = new unsigned char* [cell_inflation_radius_ + 2]; cached_distances_ = new double*[cell_inflation_radius_ + 2];
注意 cached_costs_ 和 cached_distance_ 保存的内容是指针,最后表示的其实就是一个行数和列数相同的矩阵。
计算方法如下:
for (unsigned int j = 0; j <= cell_inflation_radius_ + 1; ++j) {
cached_distances_[i][j] = hypot(i, j);
}
也就是 i 行 j 列的 cached_distances 值是以i,j为直角边的斜边长。比如,如果 cell_inflation_radius_ = 1, 那么矩阵就是1+2=3维:
[[0, 1, 2] [1, sqrt(1+1), sqrt(1+2)] [2, sqrt(2+1), sqrt(2+2)]]
其实就是表示离(0,0)距离i,j位置的格子个数。
计算 cached_costs_ 是根据刚才计算的 cached_distance_ 来计算的。
for (unsigned int i = 0; i <= cell_inflation_radius_ + 1; ++i) {
for (unsigned int j = 0; j <= cell_inflation_radius_ + 1; ++j) {
cached_costs_[i][j] = computeCost(cached_distances_[i][j]);
}
}
也就是一一对应 cached_distances_ 来计算:
inline unsigned char computeCost(double distance) const {
unsigned char cost = 0;
if (distance == 0)
cost = LETHAL_OBSTACLE;
else if (distance * resolution_ <= inscribed_radius_)
cost = INSCRIBED_INFLATED_OBSTACLE;
else {
// make sure cost falls off by Euclidean distance
double euclidean_distance = distance * resolution_;
double factor = exp(-1.0 * weight_ * (euclidean_distance - inscribed_radius_));
cost = (unsigned char)((INSCRIBED_INFLATED_OBSTACLE - 1) * factor);
}
return cost;
}
也就是计算距离障碍物欧式距离 euclidean_distance, 根据远近来确定cost的大小:
| euclidean_distance | cost |
|---|---|
| 0 | LETHAL_OBSTACLE(254) |
| > 0 && <= inscribed_radius_ | INSCRIBED_INFLATED_OBSTACLE(253) |
| > inscribed_radius_ && <= inflation_radius | factor由指数分布确定,(INSCRIBED_INFLATED_OBSTACLE-1)*factor |
最后也计算出一个cost的正矩阵来。后面更新cost时就基于这个矩阵来计算。
计算cost值
首先,定义一个class: CellData表示一个cell以及这个点附近的一个障碍物cell。在计算cost的时候维持一个map:
class CellData {
public:
/**
* @brief Constructor for a CellData objects
* @param i The index of the cell in the cost map
* @param x The x coordinate of the cell in the cost map
* @param y The y coordinate of the cell in the cost map
* @param sx The x coordinate of the closest obstacle cell in the costmap
* @param sy The y coordinate of the closest obstacle cell in the costmap
* @return
*/
explicit CellData(double i, unsigned int x, unsigned int y, unsigned int sx, unsigned int sy)
: index_(i),
x_(x),
y_(y),
src_x_(sx),
src_y_(sy) {
}
unsigned int index_;
unsigned int x_, y_;
unsigned int src_x_, src_y_;
};
std::map<double, std::vector<CellData>> inflation_cells_;
这个map的key表示distance,cell距离障碍物的距离(cell个数×resolution); value是一个vector, 表示和障碍区距离为key的所有cell和障碍物对。初始时候,距离为0的key的值是所有障碍物cell 的vector。从distance==0开始计算,每计算一个cell,就将这个cell标记为seen,后面就不会计算这个点了。 同时,会将这个cell前后左右四个cell加入到inflation_cells_中对应distance的vector中。
如此遍历这个inflation_cells_不同距离的所有cells,计算每个cell的新cost:
if (old_cost == NO_INFORMATION && (inflate_unknown_ ? (cost > FREE_SPACE) : (cost >= INSCRIBED_INFLATED_OBSTACLE))) {
master_array[index] = cost;
} else {
master_array[index] = std::max(old_cost, cost);
}
即对未知区域的处理是:
- 如果设置了inflation_unknown,并且新计算的cost>FREE_SPACE,就使用新的cost覆盖;
- 如果没有设置inflation_unknown,并且cost > INSCRIBED_INFLATED_OBSTACLE, 也是用新的cost覆盖。
其他情况选择新旧cost中比较大的一个作为新的cost。
总结
总的来说,要注意两个参数,一个是 footprint_padding,另一个是 inflation_radius_。 前者在原始的机器人多边形基础上进行xy方向的膨胀,然后在膨胀层再膨胀 inflation_radius_, 这个参数通常使用机器人的半径,保证机器人能通过。前者 footprint_padding 可以认为是安全距离,保证机器人能通过时两边还能距离障碍物这个 距离。