机器人数学基础
概率(概率机器人)
基本
- 基本公理
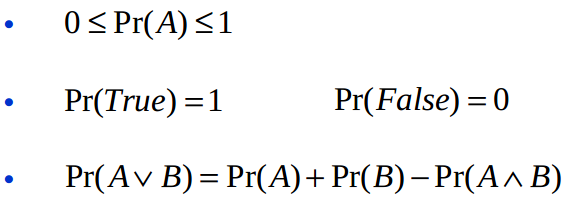
Figure 1: 概率基本公理
- 变形和使用
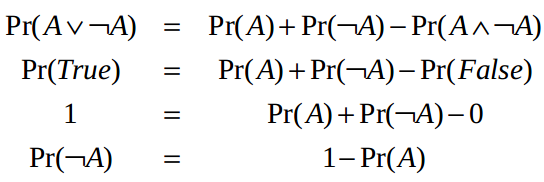
Figure 2: 概率基本公理变形和使用
联合概率和条件概率
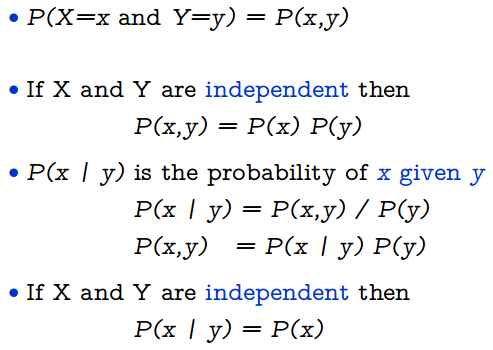
Figure 3: 联合概率和条件概率
全概率公式
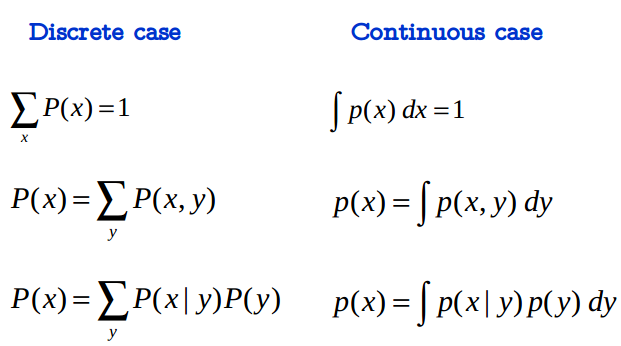
Figure 4: 全概率公式
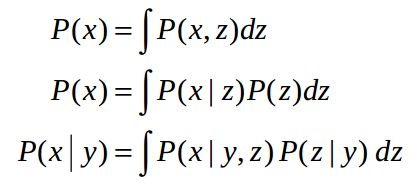
Figure 5: 全概率公式(条件)
Bayes 公式
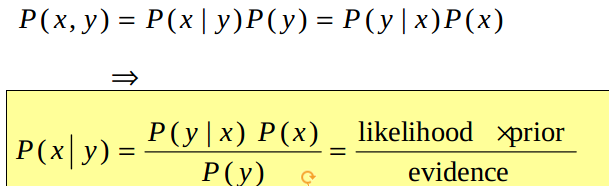
Figure 6: Bayes公式
归一化:
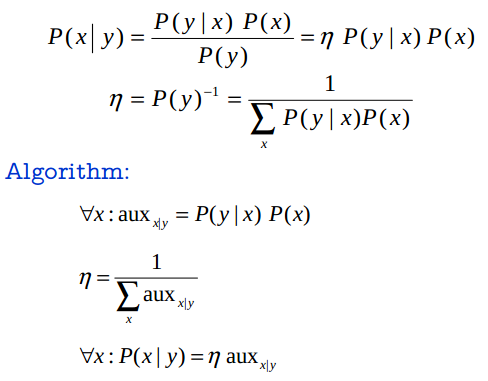
Figure 7: Bayes公式归一化
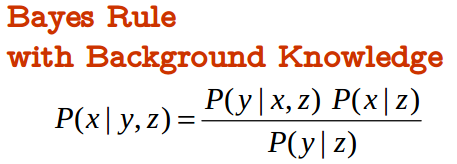
Figure 8: Bayes公式(多条件)
条件独立
如果x,y独立:
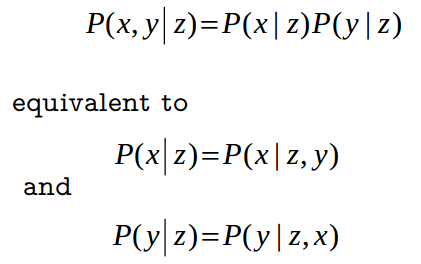
Figure 9: 条件独立
正态分布
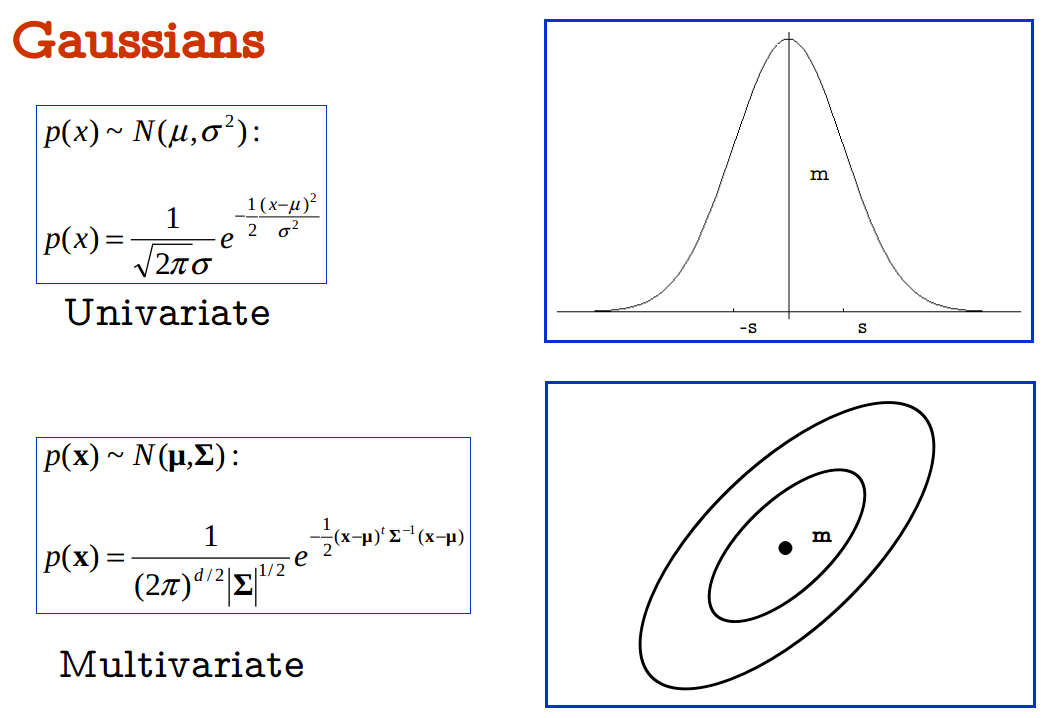
Figure 10: 一维及多维正态分布
多维正态分布属性:
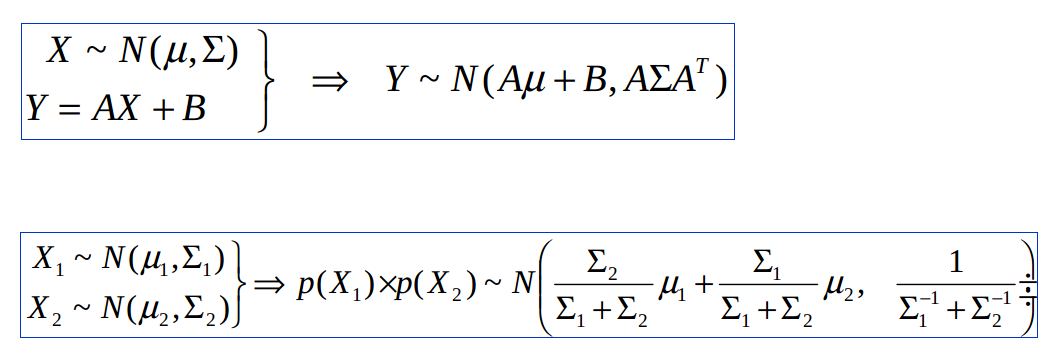
Figure 11: 多维正态分布属性
迭代贝叶斯更新
- Markov assumption (所有观测相互独立)
迭代贝叶斯更新:
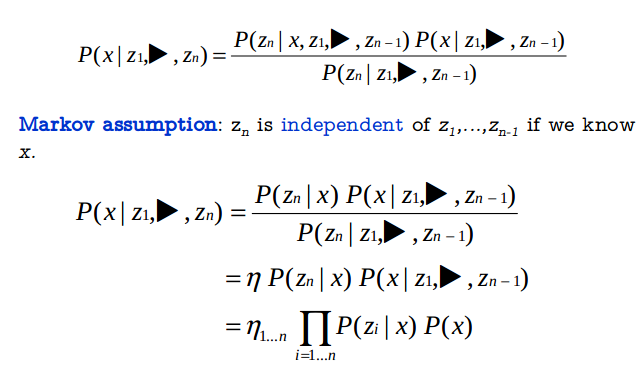
Figure 12: 条件独立