erlang节点之间的通信原理
问题
- 节点怎么识别到对方?
- 节点怎么建立联系?
- 节点之间的通信包括哪些?
- 如何将erlang的自身集群通道和工程的数据通道分离开?
节点怎么识别对方
- 节点以分布式模式启动 节点启动的时候如果使用了-name或者-sname,此时节点名为nodename@hostname形式,不以分布式模式启动时名字恒为 nonode@nohost(当然也可以在命令行中使用net_kernel:start/1转化为分布式节点)。只有以分布式模式启动的时候才 可以加入集群,而且节点比如同时使用-name或者-sname,不一样也不能加入集群。
节点怎么识别对方 每台机器上启动第一个vm的时候都会顺带启动一个后台进程epmd(Erlang Port Mapper Daemon),该进程默认监听 TCP/IP 4369端口。该端口可以通过下面两种方式进行更改:
//单独启动epmd进程 $ epmd -dmemon -port 5000 // epmd随分布式节点启动, -epmd参数指定epmd启动方式,其中的-port端口指定监听端口,-epmd_port指定node连接的epmd端口. $ erl -name hello@cong.com -epmd "epmd -port 5000 -daemon" -epmd_port 5000
epmd的端口更改之后,连接虚拟机就要指定这个新的端口,指定方式也有两种方式:
$ erl -name hello@cong.com -epmd_port 5000
ERL_EPMD_PORT=5000
kernel的erl_epmd模块提供epmd协议的封装,向net_kernel模块提供服务。如果net_kernel要连接其他节点的时候, 就取出节点名称的ip部分,透过erl_epmd建立连接到ip:4369,通过epmd协议来查询想要的foo的端口,然后再用 ip:port去连接真正的服务。
分布式节点之间是全联通的,也就是nodeA和nodeB建立连接之后,nodeB会介绍已经和其建立连接的所有节点给nodeA,这样彼 此之间就都会建立联系了, 最后形成一个全联通的网络。
查看在epmd上注册的node有下面的方法:
直接通过epmd查看:
$ epmd -names name emqttd0 at port 6369 name ityerpc1 at port 17759 name emqttd1 at port 19835 name rabbit at port 25672
在erl shell中查看:
(ityerpc1@127.0.0.1)1> erl_epmd:names(). {ok,[{"rabbit",25672}, {"emqttd1",19835}, {"ityerpc1",17759}, {"emqttd0",6369}]}
各个服务node监听的端口是不一样的,也可以配置kernel参数指定端口范围:
application:set_env(kernel, inet_dist_listen_min, 9100). application:set_env(kernel, inet_dist_listen_max, 9105).
那么该node的端口就会再9100~9105之间,如果要固定为某个端口可以将两个参数设置为一样就行。
节点之间怎么建立联系
节点之间的互联只要通过一种方式建立了连接,后面就可以进入分布式系统,成为其中的一个节点了。节点之间的连接主要是 通过net_kernel来处理。
比如可以通过net_adm:ping(Node).建立连接,如果成功了就会收到pong回应,否则收到pang的失败回应。
也可以通过net_kernel:connect_node(Node).建立连接, net_kernel模块还提供了disconnect_node(Node)函数,用来断开连接。
net_kernel默认会在引用到其它节点时(如rpc:call/5, spawn/4, link/1等),自动与该节点建立连接,通过 -dist_auto_connect false选项可以关闭这种行为,如此只能通过net_kernel:connect_node/1手动显式地建立连接。
节点之间的通信包括哪些
- 节点之间的时钟信号(确认是否alive)
节点之间要确定彼此是否alive的,因此会每个一段时间发送一个时钟信号,发送时钟信号的频率可以通过下面两种方式控制:
vm.args文件的kernel参数控制:
-kernel net_ticktime 60
- 使用函数net_kernel:set_net_ticktime/1,2可以设置发送时钟的周期值,而获取这个值可以使用net_kernel:get_net_ticktime/0获取。
rpc传输的数据和指令
以emqttd为例,连接量较大的时候, 特别是在投递消息的时候都是通过rpc来进行节点之间的投递的,这样rpc的数据量就会很大,如果 造成了通道的阻塞,就没有办法正常发送确认设备存活的时钟信号,就可能误判为节点已经挂了。
为了解决这个方法,可以将erlang节点间的集群通道和项目的数据通道分离开,使用两个端口,这样就必须不影响了。gen_rpc 这个项目 就是做了这个事情,可以参考。
- mnesia的数据同步
gen_rpc原理
核心原理就是mailbox-per-node,也就是针对集群中的每个节点产生相应的进程,针对每个节点有一个相应的信箱。这样就不会所有数据 都阻塞vm的分布式端口。
- 当一个client要发送数据到远端节点RemoteNode时,需要查询以RemoteNode命 名的进程。
- 如果RemoteNode命名的进程没有找到,会向dispatcher进程请求一个新的进程, 而dispatcher会通过合适的client supervisor生成一个新的进程。
- client进程会连接远端节点的gen_rpc server。向其发送请求等待回应。因此 gen_rpc server是接收所有节点请求的进程。
- gen_rpc server会请求acceptor supervisor进程启动一个新的acceptor,让 他处理新的socket连接。
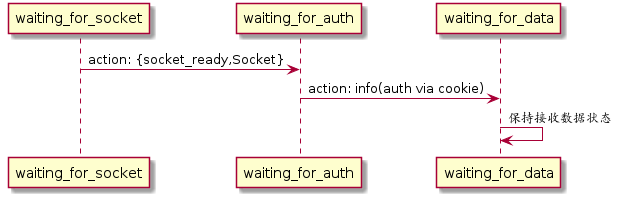
- acceptor接管新的socket连接并通过cookie认证client。
gen_rpc的各个进程状态切换
server 之 gen_rpc_server_tcp
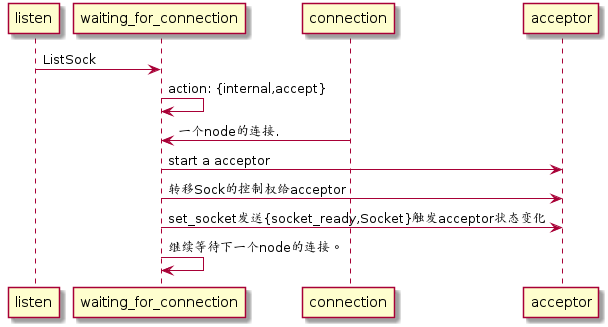
server 之 acceptor
如果收到的request是不需要回复的(如cast等)直接spawn一个进程执行即可。如果是需要回复的(比如call, async_call) 则会派生两个进程,call_worker, [self(), CallType, RealM, F, A, Caller]),并将acceptor的Pid(self())作为参数 带入,在call_worker中再spawn_monitor一个进程,同时进行monitor: {MPid, MRef} = erlang:spawn_monitor(?MODULE, call_middleman, [M,F,A]) 。当call_middleman执行完之后执行exit,这样监控进程call_worker就会收到退出信号: {'DOWN', ....}, 再由call_worker 通过!直接发回给acceptor。acceptor 收到之后通过socket将结果返回发送请求的node。
call_worker(Server, CallType, M, F, A, Caller) -> {MPid, MRef} = erlang:spawn_monitor(?MODULE, call_middleman, [M,F,A]), receive {'DOWN', MRef, process, MPid, {call_middleman_result, Res}} -> Server ! {CallType, Caller, Res}; {'DOWN', MRef, process, MPid, AbnormalExit} -> Server ! {CallType, Caller, {badrpc, AbnormalExit}} end.client
当我们通过gen_rpc:call/cast等等调用的时候,会调用gen_rpc_client模块处理,这里会首先查询是否有要连接的node对应的client进程,如果没有就调用 dispatcher进程生成一个,再通过该进程将任务发送到远端节点。
本节点需要连接远端节点node1时会给该node1生成一个client(gen_server),通过该client去连接node1的tcp_server_port(因此,在配置的时候,tcp_server_port是 本节点的端口,tcp_client_port是远端节点的tcp_server_port)。连接之后立刻进行认证。这样node1就会执行waiting_for_auth函数了。
client和server都有一个不活跃时间,该时间过后进程会被stop掉。