从贝叶斯滤波开始
Bayes
Bayes的推导
Bayes是概率机器人中最基础的一个概念。它的产生其实很简单,就是基于联合概率密度,条件概率密度等概念产生的。
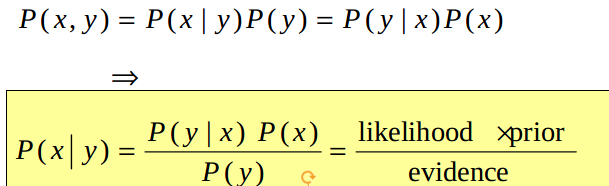
Figure 1: 贝叶斯公式
这就是贝叶斯公式。在概率机器人中P(x|y)可以理解为获得外界观测信息y之后机器人状态x的概率。P(y|x)是似然函数, 最终可以将贝叶斯理解为观测信息的加入,进一步改变了/修正了状态x的概率。
由于P(y)是常数,所以常常写成:
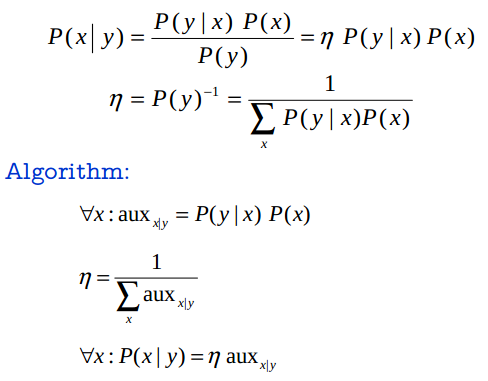
Figure 2: 贝叶斯归一化
Bayes的扩展
上面给出了一个条件下的Bayes公式,在实际运用中我们可以增加不同的条件。比如SLAM中需要的观测信息,于是就有了:
P(x|z1, z2, z3, ..., zn)
这是引入多个观测信息的情况,实际中状态还会受到驱动的影响,所以还会加入驱动信息,于是就有了:
P(x|u1,z1, u2,z2, u3,z3, ..., un,zn)
上式就是Bel(xt)表示状态的置信度。
Markov假设
根据 Markov 假设,我们可以得到递归 Bayes 更新公式。Markov假设是SLAM中一个比较重要的概念。
如果知道当前的状态xt,Markov假设设定过去和未来的数据都是独立的。
Recursive Bayesian Updating
Bel(xt) = phi P(zt | xt) ~Bel(xt)